
Search
Conference Paper
Time-Delay and Doppler Estimation with a Carrier Modulated by a Band-Limited Signal
In Proc. IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Los Sueños, Costa Rica, December 10-13, 2023.
Since time-delay and phase estimation is a fundamental task in a plethora of engineering fields, several CRB and MLE expressions have been derived for the past decades. In all these previous works, a common hypothesis is that the wave transmission process introduces an unknown phase which prevents from estimating both delay and transmission phase components. By revisiting this problem, including the derivation of the MLE and the associated CRB, we show that this well-admitted assertion is not true strictly: both informations can be estimated, but generally with a sub-optimal achievable MSE in the asymptotic region. Moreover, since practical problems exist where the transmission phase can be estimated apart, adding this additionnal measure to the observation model provides a setting allowing to explore the contribution of each signal component (carrier frequency, baseband signal and transmission phase measure) to the achievable MSE of time-delay and phase estimation in the asymptotic region.
Signal and image processing / Aeronautical communication systems and Space communication systems
An EM Approach for GNSS Parameters of Interest Estimation Under Constant Modulus Interference
In Proc. 31st EUropean SIgnal Processing COnference (EUSIPCO 2023), Helsinki, Finland, September 4-8, 2023.
Interferences are an important threat for applications relying on Global Navigation Satellite Systems (GNSS). Interferences degrade GNSS performance, and can lead to denial of service. The most notable intentional interference family is characterized by its constant envelope, e.g. chirp and tone interferences. Due to its simple structure, the space to search the interference contribution yields to complex circles, allowing the introduction of some latent variables related to those circles. In order to mitigate the interference effect, we compute the maximum likelihood estimator of the parameters of interest (time delay and Doppler shift) in presence of those latent variables. Thus, we resort to the Expectation Maximization algorithm which has already been proved to be efficient in such cases. Experiments conducted on synthetic signals highlight the efficiency of the proposed algorithm.
Signal and image processing / Localization and navigation and Space communication systems
Theoretical Performance Analysis of GNSS Tracking Loops
In Proc. IEEE/Institute of Navigation (ION) Positioning, Location, and Navigation Symposium (PLANS), Monterey, California-USA. April 24-28, 2023.
This paper aims to characterize the estimation precision at the output of the GNSS receiver tracking stage. We define an original statistical modelling of the GNSS tracking loop, which can then be exploited by an optimal linear Kalman Filter (KF) in order to obtain an analytical expression of the steady-state regime. The latter is designed to encompass dynamic information of the GNSS receiver. Two observation models are of interest: the first one considers the propagation delay and Doppler parameters, and the second one also including the Doppler rate, i.e., the acceleration, which is known to be relevant for high dynamics scenarios and can easily be included into the acquisition step. Within this context, the steady-state asymptotic performance of the tracking stage is obtained by solving an algebraic discrete Riccati equation. In both cases, simulation results are provided to show the validity of the proposed approach and the resulting steady-state performance.
Signal and image processing / Localization and navigation and Space communication systems
GNSS L5/E5 Maximum Likelihood Synchronization Performance Degradation under DME Interferences
In Proc. IEEE/Institute of Navigation (ION) Positioning, Location, and Navigation Symposium (PLANS), Monterey, California-USA. April 24-28, 2023.
Global Navigation Satellite Systems (GNSS) are a key player in a plethora of applications. For navigation purposes, interference scenarios are among the most challenging operation conditions, which clearly impact the maximum likelihood estimates (MLE) of the signal synchronization parameters. While several interference mitigation techniques exist, a theoretical analysis on the GNSS MLE performance degradation under interference, being fundamental for system/receiver design, is a missing tool. The main goal of this contribution is to introduce a mathematical tool to evalute the effect of any type of interference on any GNSS signal. Regarding such tool, we provide closedform expressions of the misspecified Cram´er-Rao (MCRB) bound and estimation bias, for a generic GNSS signal corrupted by an interference. The proposed expressions are used to analyze the GNSS performance degradation induced by the distance measuring equipment (DME) system.
Signal and image processing / Localization and navigation and Space communication systems
Theoretical Evaluation of the GNSS Synchronization Performance Degradation under Interferences
In Proc. 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, Colorado, USA, September 19-23, 2022.
Global Navigation Satellite Systems (GNSS) are a key player in a plethora of applications, ranging from navigation and timing, to Earth observation or space weather characterization. For navigation purposes, interference scenarios are among the most challenging operation conditions, which clearly impact the maximum likelihood estimates (MLE) of the signal synchronization parameters. While several interference mitigation techniques exist, a theoretical analysis on the GNSS MLE performance degradation under interference, being fundamental for system/receiver design, is a missing tool. The main goal of this contribution is to provide such analysis, by deriving closed-form expressions of the estimation bias, for a generic GNSS signal corrupted by an interference. The proposed bias are validated for a tone interference and a linear frequency modulation chirp interference.
Signal and image processing / Localization and navigation and Space communication systems
Close-to-Ground Single Antenna GNSS-R
In Proc. ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Online Event, 5-7 april 2022.
For more than three decades, Global Navigation Satellite System (GNSS) signals have been seen as signals of opportunity as in GNSS Reflectometry (GNSS-R). The study of the reflections from the ground of such signals can indeed lead to many features regarding the reflecting surface and the receiver’s height. Due to the nature of the GNSS signal, that is, due to its wavelength, the distortion of the reflected signal may vary significantly depending on the reflecting surface and on the dynamic and height of the receiver. The latter does range from low earth orbit down to ground-based platforms. In this last case, the vicinity to the ground induces important interference between the direct and the reflected path which makes it difficult to process directly in order to obtain altimetry product. In this study, the feasibility of ground-based single antenna GNSS-R altimetry is studied and solutions are presented depending on the satellite elevation angle. To do so, maximum-likelihood-based algorithms - namely the CLEAN-RELAX Estimator and the Approximate Maximum Likelihood Estimator - are presented and applied to a set of scenarios.
Signal and image processing / Localization and navigation
Multipath Estimating Techniques Performance Analysis
In Proc. IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2022.
In Global Navigation Satellite Systems, resilience to multipath remains an important open issue, being the limiting factor in several applications due to the environment specific nature of such harsh propagation conditions. In order to assess the multipath impact into the final system performance, accurate metrics are required. The multipath error envelope (MPEE), even if easy to handle, is limited to the study of the bias of a receiver architecture in a noise free environment. Moreover, when it is a flat zero-valued line, the MPEE becomes less informative about the parameter estimation performance. Considering an unbiased estimator, an alternative way to characterize an architecture is to evaluate its mean square error (MSE) and compare it to the corresponding Cram´er-Rao bound (CRB). In this work, a methodology to use both aforementioned tools is presented. First, the MPEE, which is an understandable metric. Secondly, the MSE convergence to the CRB, where one can clearly interpret the estimation performance in terms of signal-to-noise ratio or minimum path separation. These tools are then applied to a range of known multipath mitigation techniques. In addition, a new alternating projection multipath mitigation approach is proposed and analyzed.
Signal and image processing / Localization and navigation
Robust Tracking under Measurement Model Mismatch via Linearly Constrained Extended Kalman Filtering
In Proc. 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Republic of Korea, December 14-18, 2020.
Standard state estimation techniques, ranging from the linear Kalman filter to nonlinear sigma-point or particle filters, assume a perfectly known system model, that is, process and measurement functions and system noise statistics (both the distribution and its parameters). This is a strong assumption which may not hold in practice, reason why several approaches have been proposed for robust filtering. In the context of linear filtering, a solution to cope with a possible system matrices mismatch is to use linear constraints. In this contribution we further explore the extension and use of recent results on linearly constrained Kalman filtering (LCKF) for robust tracking/localization under measurement model mismatch. We first derive the natural extension of the LCKF to nonlinear systems, and its use to mitigate parametric modelling errors in the nonlinear measurement function. A tracking problem where a set of sensors at possibly mismatched (unknown to a certain extent) positions track a moving object from time of arrival measurements is used to support the discussion.
Signal and image processing / Localization and navigation and Space communication systems
A Compact CRB for the Single Source Conditional Signal Model with Application to Delay-Doppler-Phase Estimation of Band-Limited Signals
In Proc. 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Republic of Korea, December 14-18, 2020.
The derivation of tight estimation lower bounds is a key player to design and assess the performance of new estimators. In this contribution, we derive a new compact Cramér-Rao bound (CRB) for the conditional signal model, where the deterministic parameter's vector includes a real positive amplitude and the signal phase. Then, such CRB is particularized to the delay, Doppler, phase and amplitude estimation with band-limited (narrowband) signals, where transmitter and receiver are in relative uniform radial movement. The latter expression is especially easy to use because it only depends on the signal samples. We provide illustrative results for a representative Global Navigation Satellite System positioning example.
Signal and image processing / Localization and navigation and Space communication systems
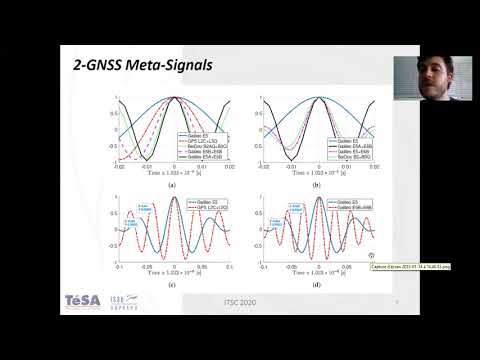
On the Time-Delay Estimation Accuracy Limit of GNSS Meta-Signals
In Proc. Intelligent Transportation Systems Conference (IEEE/ITSC), Rhodes, Greece, September 20-23, 2020.
In standard two-step Global Navigation Satellite Systems (GNSS) receiver architectures the precision on the position, velocity and time estimates is driven by the precision on the intermediate parameters, i.e., delays and Dopplers. The estimation of the time-delay is in turn driven by the baseband signal resolution, that is, by the type of broadcasted signals. Among the different GNSS signals available the socalled AltBOC modulated signal, appearing in the Galileo E5 band and the new GNSS meta-signal concept, is the one which may provide the better time-delay precision. In order to meet the constraints of safety-critical applications such as Intelligent Transportation Systems or automated aircraft landing, it is fundamental to known the ultimate code-based precision achievable by standalone GNSS receivers. The main goal of this contribution is to assess the time-delay precision of AltBOC type signals. The analysis is performed by resorting to a new compact closed-form Cramér-Rao bound expression for time-delay estimation which only depends on the signal samples. In addition, the corresponding time-delay maximum likelihood estimate is also provided to assess the minimum signal-to-noise ratio that allows to be in optimal receiver operation.
This video is embedded from YouTube. Playing it is subject to Google's privacy policy.
Signal and image processing / Localization and navigation and Space communication systems
ADDRESS
7 boulevard de la Gare
31500 Toulouse
France

CONTACT

